
I led a workshop lecture introducing robot kinematics and ROS2 to the software and electrical subteams of the JHU Mars Rover Team. It details the math and reasoning behind homogeneous transforms with detailed figures and explanations. Once the general idea is covered, I highlight the power and functionality of ROS2 as a middleware framework for robotics. Finally, I give a hands-on example of a subscriber and publisher package, the core of ROS2 communication. The slides can be found here.

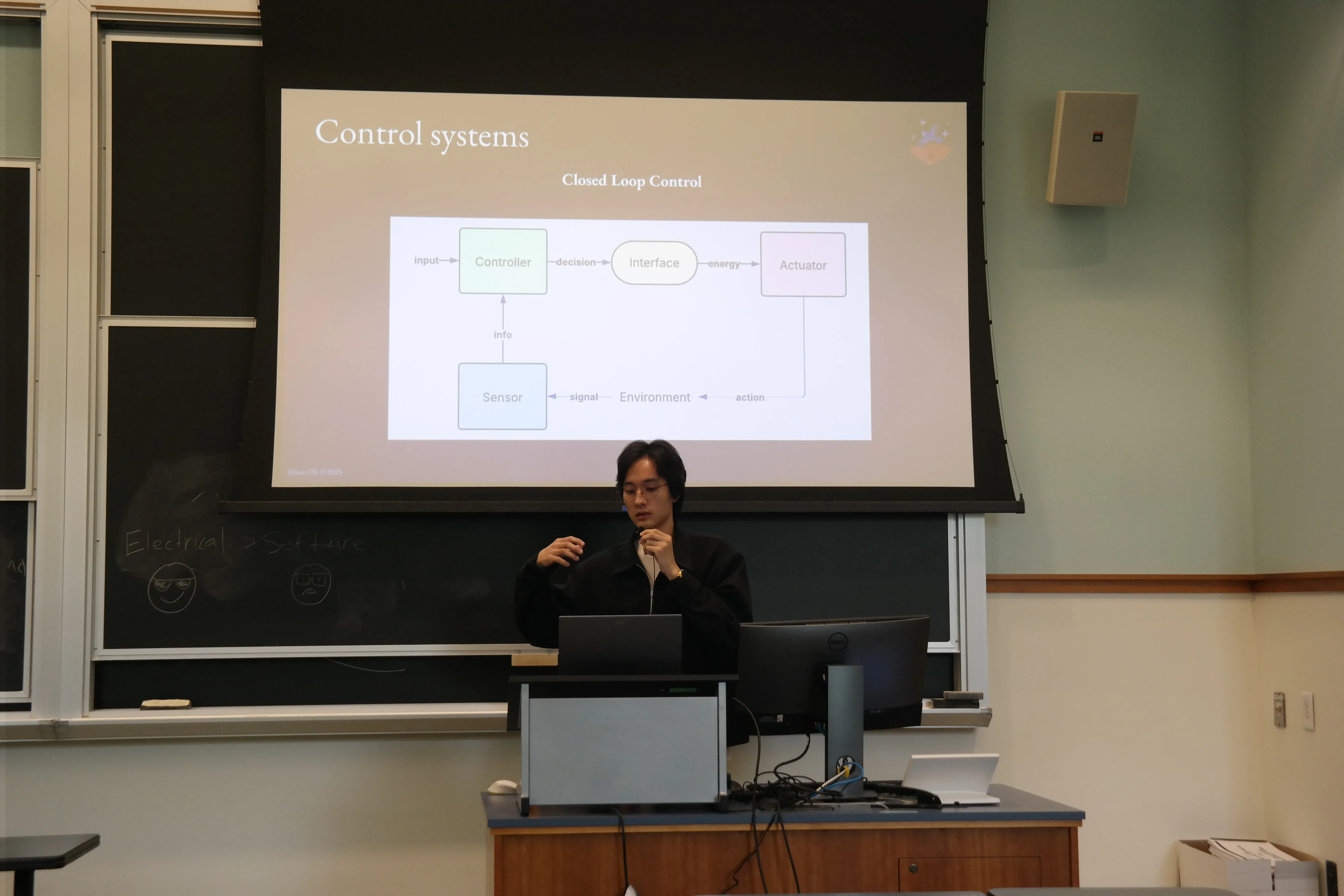
photos from the lecture