Visit the wiki for more information on this project.
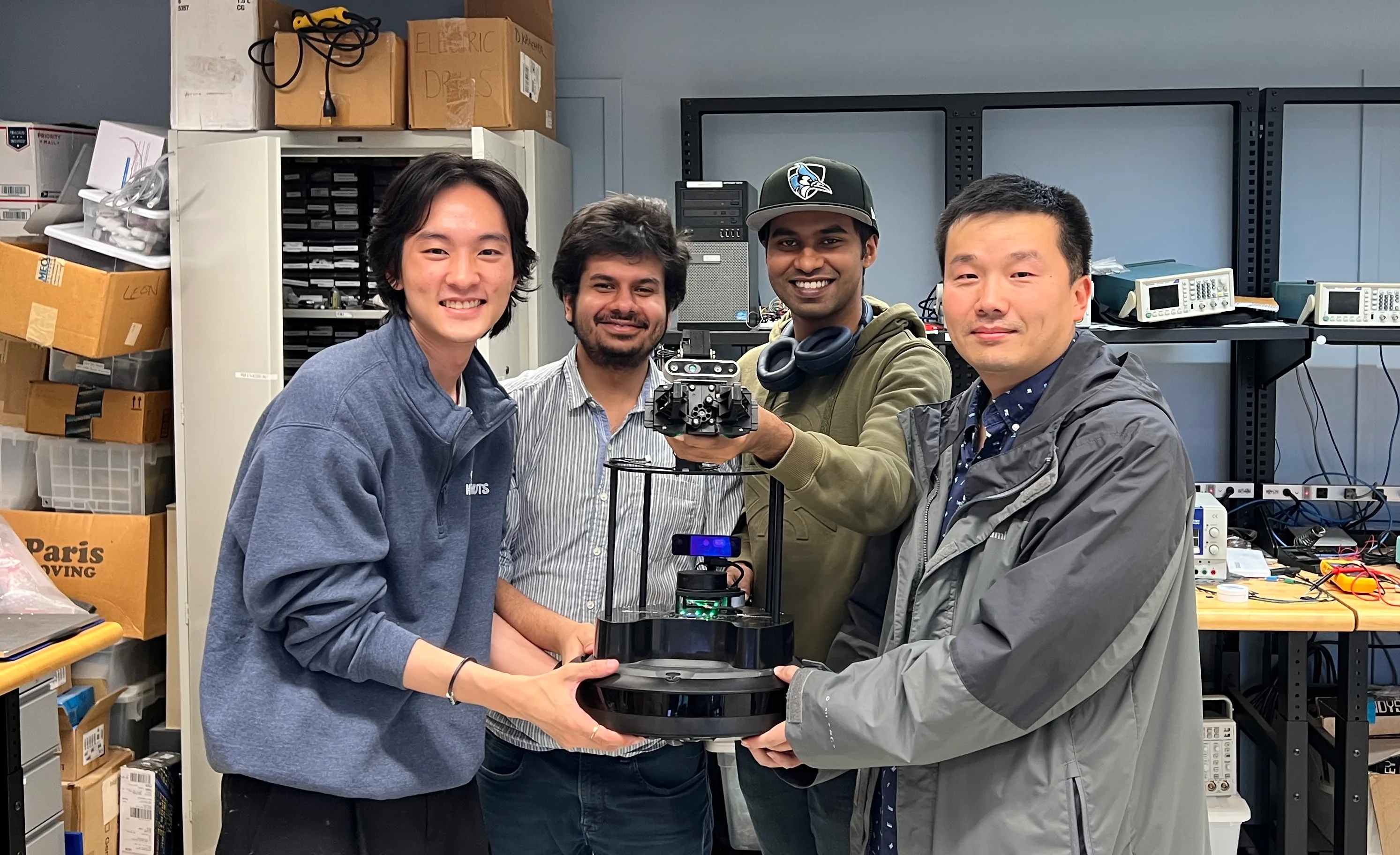
In collaboration with Marvin Gao, Ritwik Rohan, and Suhash Reddy Thandheri, we developed a ROS2 package for an autonomously patrolling robot that picks up trash in the vicinity of its patrol route.
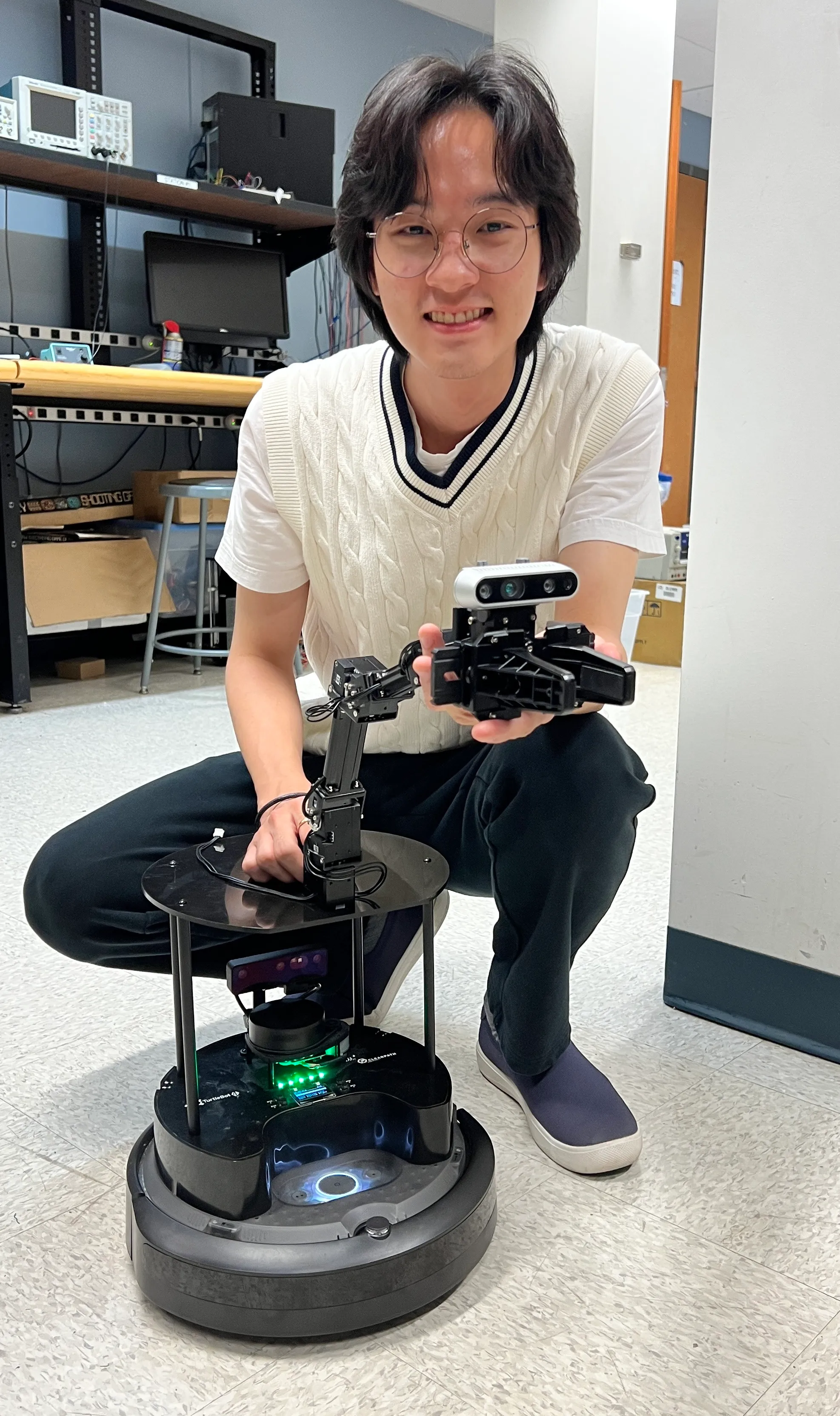
Our goal for this project was to develop a proof-of-concept package that allows the user to control, both in simulation and in the real-world, a Turtlebot4 X OpenMANIPULATOR-X mobile arm robot. The arm was attached to the Turtlebot mounting plate by fasteners through laser cut holes.
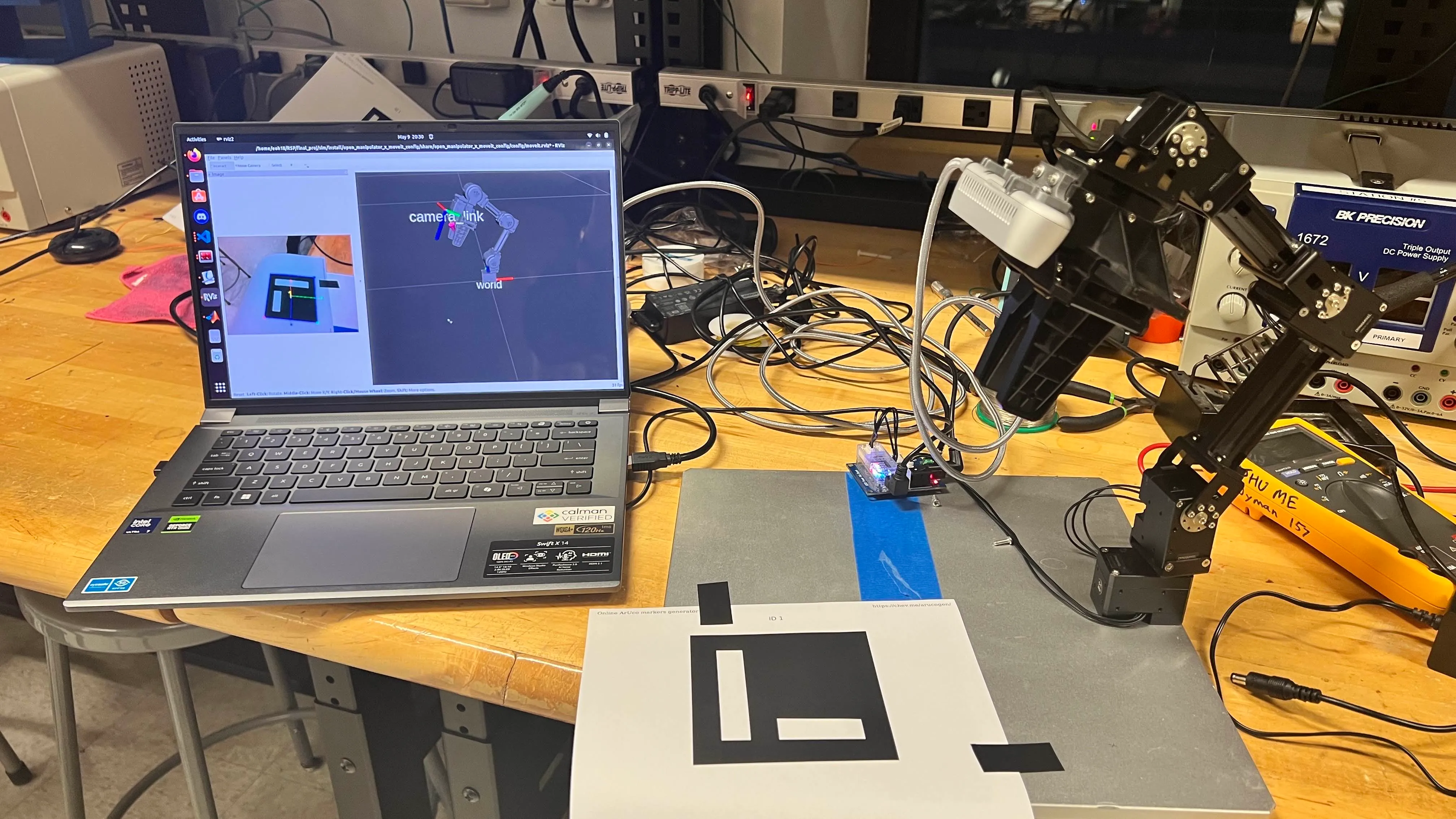
Below is our hand-eye calibration process.